|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Ущільнення при закриванні
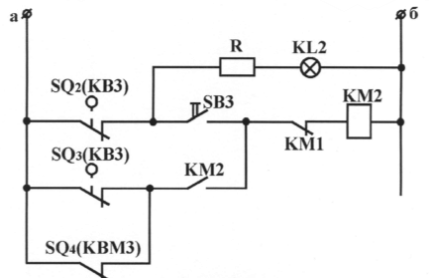
В момент подачі командного імпульсу від кнопок дистанційного керування SB2 або SB3 подається живлення відповідно на котушки КМ1 або КМ2 реверсивного магнітного пускача. Пускач спрацьовує й залишається включеним через власний блок-контакт КМ1 або КМ2 і контакти кінцевих вимикачів SQ1 (КВВ) і SQ2 (КВЗ). При досягненні запірним органом положення повного відкривання або закривання відповідний кінцевий вимикач розриває коло живлення котушки пускача й привід зупиняється. Для попередження одночасного включення обох котушок магнітного пускача, крім механічного блокування, яким укомплектований пускач, у схемі передбачене електричне блокування при допомозі розмикаючих контактів КМ2 або КМ1. При випадковому заклинюванні запірного орана в проміжному положенні відключення електродвигуна здійснюється контактами муфти крутного моменту SQ3 (КВМЗ), яка діє при закриванні РО. Кнопка SB1 використовується для зупинки РО в проміжному положенні при відміні дії хибного командного сигналу. Сигнальні лампи HL1 і HL2 забезпечують сигналізацію відповідно закритого й відкритого положення РО. У проміжному положенні одночасно світяться обидві лампочки. На рисунку 6.3 приведений фрагмент керування ВМ запірного регулюючого органа, але з примусовим ущільненням при закриванні. Такі схеми характерні для дистанційного керування вентилями, які вимагають примусового " дотискування" при закриванні. Даний фрагмент підключають до точок а-б попередньої схеми замість кола керування котушки пускача КМ2.
Рисунок 6.З - фрагмент схеми керування ВМ з примусовим ущільненням В цій схемі розмикання в колі живлення пускача КМ2 при закриванні виконується не контактами кінцевого вимикача, а контактами SQ4 (КВМЗ) муфти крутного моменту. При подачі імпульсу на закривання пускач КМ2 одержує живлення через власний контакт і паралельно включений контакти кінцевого вимикача SQ3 (КВЗ) 7-8 і муфти крутного моменту SQ4 (КВМЗ). Перед повним закриттям запірного органу розмикаються контакти SQ3 (КВЗ) 7-8. Котушка пускача КМ2 при цьому залишається включеною через контакт SQ4 (КВМЗ). При досягненні необхідної щільності закривання РО момент опору на валу зростає вище граничного крутного моменту муфти, вона спрацьовує і короткочасно розмикає контакт SQ4. Коло котушку пускача КМ2 розмикається і ВМ зупиняється. Контакти кінцевого вимикача SQ3 (КВЗ) 7-8, включені паралельно контактам SQ4 (КВМЗ), щоб уникнути зупинки ВМ у проміжному положенні при випадкових заїданнях запірного органу. Відключення приводу при заклинюванні в проміжних здійснюється тепловим роз'єднувачем автоматичного вимикача SA, який встановлений у силових колах двигуна. Для запобігання подачі хибної команди на закривання вже повністю закритого РО, що може призвести до його поломки, в коло подачі імпульсу на закривання включений контакт кінцевого вимикача SQ2 10-12. 6.2.2 Схеми підключення однооборотних ВМ у контурах регулювання Безконтактне автоматичне керування однооборотними ВМ здійснюється, як правило, через безконтактні пускачі та підсилювачі й блоки керування БУ-21. Приклад схеми керування з використанням трипозиційного підсилювача У 29 показана на рисунку 6.4.
Рисунок 6.4 - Схема керування ВМ типу МЭО з однофазним двигуном без електромагнітного гальма через тиристорний підсилювач У29 і Блок керування БУ-21
Рисунок 6.5 - Схема включення пускача типу ПБР-ЗА для ВМ із Двигунами типу 4А і АОЛ На рис.6.5 поданий спосіб безконтактного керування ВМ з трифазним двигуном при допомозі тиристорного пускача ПБР-3.До клем 8-10 підключені кола імпульсних регуляторів. Варіанти безконтактних схем кеування ВМ з однофазними двигунами представлені на рис.6.6.В якості силового контактора використовується тиристорний пускач ПБР-2М(ПБР-2-3).Зовнішній ключ керування S2 формує два режими роботи контура регулювання " Ручний" чи " Автоматичний".При допомозі ключа S1 є змога через пускач в режимі " Ручний" керувати приводом.
F - автомат захисту типу АП-503; SI - перемикач дистанційного керування; S2 - перемикач роду роботи; ВМ1 - виконавчі механізми МЭП (МЭО, МЭМ) із механічним гальмом і двигунами типу ДАУ-П (ДАУС), ДСР; ВМ2 - виконавчі механізми МЭО з електромагнітним гальмом і двигуном ДАУ-П (ДАУ-С). Рисунок 6.6 - Схеми підключення ПБР-2М до ВМ
Ш - індикатор положення; РД - реостатний датчик; КК - багаторежимний ключ керування. Рисунок 6.7 - Схема керування однооборотним ВМ із трифазним двигуном в автоматичному та ручному режимах. На рис. 6.7 приведений ще один варіант інтеграції ВМ з трифазним двигуном в контур регулювання з контактним способом керування ним при допомозі магнітних пускачів.Режими роботи приводу задаються одним багаторежимним перемикачем КК.
|
Последнее изменение этой страницы: 2019-04-09; Просмотров: 273; Нарушение авторского права страницы