|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Режимы работы якорно-швартового устройстваСтр 1 из 5Следующая ⇒
СОДЕРЖАНИЕ Введение ТЕОРЕТИЧЕСКАЯ ЧАСТЬ 1.1. Назначение и основные элементы якорно-швартовых устройств ...........3 1.2. Требования Регистра РФ .........................................5 1.3. Режимы работы якорно-швартового устройства........................7 РАСЧЕТНАЯ ЧАСТЬ 2.1. Расчет и выбор двигателя якорно-швартового устройства................9 2.2. Расчет и построение механической характеристики МАП 421-4/8ОМ1 .....17 2.3. Расчет и построение нагрузочной характеристики МАП 421-4/8ОМ1 ......21 2.4. Расчет и построение механической характеристики МАП 422-4/8ОМ1 .....22 2.5. Расчет и построение нагрузочной характеристики МАП 422-4/8ОМ1 ......26 АНАЛИТИЧЕСКАЯ ЧАСТЬ 3.1. Выбор двигателя и анализ технико-экономической части................29 3.2. Анализ систем управления.......................................29 3.3. Анализ защиты электродвигателей.................................31 3.4. Выбор и анализ схемы, описание работы схемы.......................33 ЗАКЛЮЧЕНИЕ. ............................................ 35 СПИСОК ЛИТЕРАТУРЫ. .....................................36
ВВЕДЕНИЕ Электропривод представляет собой электромеханическую систему, состоящую из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением. Современное машинное устройство или, как его называют иначе, производственный агрегат состоит из большого числа разнообразных деталей, отдельных машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Необходимо хорошо знать назначение отдельных элементов, составляющих машинное устройство, так как без этого невозможно правильно обслуживать ее в эксплуатации. Цель курсового проекта – рассчитать электропривод якорно-швартового устройства судна. Для этого необходимо: выбрать якоря и якорные цепи, рассчитать тяговые усилия и моменты на валу, по полученным расчетным данным выбрать подходящий двигатель, построить механическую и электромеханическую характеристику, а также построить нагрузочные диаграммы и выбрать схему управления электроприводом якорно-швартового устройства судна.
ТЕОРИТИЧЕСКАЯ ЧАСТЬ В состав якорно-швартовного устройства входят якоря, якорные цепи, якорно-швартовная лебедка, исполнительный двигатель и система управления. Якоря. В настоящее время чаще всего применяют якоря с поворотными лапами (якоря Холла), которые обладают большой держащей силой, легко укладываются по-походному и состоят из небольшого числа грубо обработанных деталей. Каждое судно снабжают двумя или тремя так называемыми становыми якорями, расположенными в носовой части судна. Третий якорь считается запасным и носит название штормового. Количество и массу становых якорей и цепей определяют по таблицам в зависимости от так называемой характеристики якорного снабжения судна: где - весовое водоизмещение судна при осадке по летнюю грузовую марку, т.; В - ширина судна наибольшая, м h - высота от летней грузовой ватерлинии до верхней кромки настила палубы самой.высокой рубки, м; А - площадь парусности в пределах длины судна L, определяется по диаметральной плоскости судна в пределах от летней грузовой ватерлинии, м2. Якорные цепи. Роль гибкой связи, соединяющий якорь с судном, выполняют якорные цепи (цепные канаты). Якорная цепь состоит из отдельных частей – смычек длиной от 20 до 25 м. Звенья якорной цепи имеют распорки (контрфорсы), что увеличивает их прочность примерно на 20 %.
Общую длину и калибр якорной цепи определяют по указанной выше характеристике якорного снабжения Nc. Под калибром d принято понимать диаметр ценного железа, который колеблется в переделах от 30 до 100 мм. Калибр цепи находят по таблицам или легко определяют (в миллиметрах) по формуле:
где Применение цепей в качестве якорного каната обуславливается следующими причинами. Метр цепи весит в 5 – 6 раз больше метра равнопрочного стального троса той же длины, благодаря этому якорные цепи обеспечивают получение значительно большей держащей силы. Буферные свойства цепи уменьшают размах килевой качки и меньше подвержены коррозии в морской воде. Якорно-швартовные лебедки. Для отдачи и подъема якоря, а также для швартовных операций служат якорно-швартовные лебедки: шпили и брашпили, различающиеся тем, что у первых ось кулачкового барабана расположена вертикально, а у вторых – горизонтально. И те, и другие располагают в носовой части судна, но брашпили вместе с основной частью электрооборудования устанавливают на палубе и почти не занимают внутренних помещений. Эта особенность обеспечила им широкое распространение на судах торгового флота. У шпилей на палубе размещают лишь якорно-швартовный барабан и тумбу управления. Все остальное оборудование находится в подпалубных помещениях судна. Брашпиль обычно приводится в движение трехскоростным асинхронным двигателем типа МАП. В настоящее время шпили и брашпили выполняют с не самотормозящимися червячными редукторами, что объясняется желанием
повысить КПД установки. На крупных судах устанавливают два якорно-швартовных шпиля – по числу якорей. На мелких судах один шпиль используют для поочередного подъема обоих якорей. Электропривод якорно-швартовных устройств служит для подъема и опускания якорей, а также для подтягивания судна к берегу при выполнении швартовных операций. На стоянках глубиной свыше 50 м скорость опускания якоря регулируют электродвигателем, который разгоняясь, переходит в режим рекуперативного торможения. 1.2 Требования Регистра РФ Якорное снабжение 1. Мощность приводного двигателя якорного механизма должен обеспечивать непрерывное выбирание в течение 30 мин. одной якорной, цепи со скоростью не менее 0, 15 м/с при тяговом усилии, определяемом по формуле:
где а - коэффициент, равный 36, 8 - для цепей категории 1 41, 7 - для цепей категории 2 46, 6 - для цепей категории 3 d-колибр якорной цепи 2. При подходе якоря к клюзу привод должен обеспечивать скорость выбирания цепи не более 0, 17 м/с. Рекомендуемая скорость втягивания якоря в клюз не более 0, 12 м/с 3. Для отрыва якоря от грунта привод якорного механизма должен обеспечивать в течение 2мин. создание в цепи на одной звездочке, тягового усилия не менее 1, 5 расчетного 4. Цепные звездочки должны иметь не менее пяти кулачков. Для звездочек с горизонтальным расположением оси угол охвата цепью должен быть не менее 115°, а с вертикальным расположением оси не менее 150°.
5. На посту дистанционного управления должен быть предусмотрен счетчик длины вытравленной цепи и указатель скорости травления цепи с отметкой предельно допустимой скорости 3м/с. Электрический привод 1. При применении электродвигателей переменного тока К.З. ротором электроприводы ЯШУ после 30 мин. работы при номинальной нагрузке должны обеспечивать возможность стоянии под током электродвигателя при номинальном напряжении в течение 30 сек. для якорных механизмов и 15 сек. для швартовных. Для двигателя с переключаемыми полюсами эти требования для работы с обмоткой, создающей наибольший пусковой момент. Электродвигатели постоянного тока и переменного с фазным ротором должны выдерживать указанный выше режим стоянки под током, но при моменте в 2 раза превышающем номинальный. Причем напряжение может быть ниже номинального. После режима стоянки превышение температуры должно быть не более 130% допустимого значения для примененной изоляции. 2. Если привод механизма может развивать момент, создающий усилие на звездочке более 0, 5 пробной нагрузки якорной цепи, то должна быть предусмотрена защита от превышения указанной нагрузки, устанавливаемая между приводом и механизмом. Швартовные механизмы 1. Привод швартового механизма должен обеспечивать непрерывное выбирание швартового троса при номинальном тяговом усилии с номинальной скоростью в течение не менее 30 мин. 2. Для швартовых устройств при номинальной нагрузке скорость не должна превышать 0, 3 м/с.
3. При расчетном режиме работы швартового механизма его привод должен обеспечивать в течение 2 мин создание в тросе на первом слое навивки на барабане тягового усилия не менее 1, 5 расчетного. 4. Автоматические лебедки должны иметь ручное управление для возможности осуществления неавтоматического режима работы. 5. Должны быть предусмотрены: а) Звуковая предупредительная сигнализация, срабатывающая при максимально допустимой длине вытравленного троса. б) Указатель фактического тягового усилия действующего в швартовом тросе при автоматическом режиме работы. РАСЧЕТНАЯ ЧАСТЬ Выбор двигателя Согласно требованиям Регистра РФ, мощность двигателя якорного механизма должна обеспечивать непрерывное выбирание якорной цепи со скоростью не менее 0, 15 м/с при тяговом усилии:
где
Данные якорной цепи, в зависимости от калибра, выбираются из таблицы 2. В курсовом проекте принять цепи особой прочности категории 3. Согласно ГОСТ 8575-77 наибольший момент электродвигателя должен создавать напряжение в цепи не превышающее напряжения 0, 6 напряжения при пробной нагрузке. С учётом отклонений на: увеличение усилия при прохождении клюза, увеличение усилия в результате трения покоя, увеличение усилия при повышении напряжения в сети, запас на пусковой момент и т.д., - напряжение якорной цепи σ max при включении привода не должно превышать 0, 2 напряжения при пробной нагрузке:
Номинальный момент исполнительного двигателя определяется по формуле
В условиях отрыва якоря от грунта, двигатель должен преодолеть полуторократные усилия сравнительно с расчетными. При условии, что момент трогания характеризуется повышением статических коэффициентов отдельных звеньев и всего механизма, пусковой момент должен быть увеличен еще на 0, 5 МН:
Номинальная частота вращения электродвигателя должна отвечать нормированной скорости выбирания цепи при расчётной нагрузке
Отсюда необходимая угловая скорость электропривода:
При переходе якоря к клюзу его скорость не должна быть более 0, 12 м/с, поэтому минимально-необходимая скорость двигателя
Отсюда номинальная мощность двигателя
По полученным данным выбираем электродвигатели серии МАП исполнений: МАП421-4/8ОМ1 и МАП422-4/8ОМ1 со следующими данными: Таблица2.1. Паспортные данные двигателя серии МАП исполнения 421-4/8ОМ1
Таблица2.2 Паспортные данные двигателя серии МАП исполнения 422-4/8ОМ1
Для всех типов шпилей и брашпилей морских судов с калибром цепи до 100 мм наиболее целесообразно применение короткозамкнутых асинхронных двигателей динамического режима, серии МАП, с двумя-тремя обмотками. При выборе необходимо учитывать нормированную стоянку двигателя под током в течении 30 секунд, продолжительность непрерывной работы – 30 минут и степень защиты IP 56. Применение системы Г – Д может быть оправдано только в случаях, когда мощность электропривода выше 20% мощности судовой электростанции. Для мощных якорных брашпилей с повышенной глубиной стоянки рекомендуется также система Г – Д. АНАЛИТИЧЕСКАЯ ЧАСТЬ Анализ систем управления Выбор для электропривода якорно-швартовного устройства той или иной схемы управления (контроллерной, релейно-контакторной, электромашинной, бустерной или др.) зависит от мощности исполнительного двигателя. Весьма перспективными в настоящее время считаются схемы тиристорного управления. По условиям работы якорно-швартовного устройства его электропривод должен работать в кратковременном режиме, обеспечивая подъем и спуск якоря с различными скоростями, плавный пуск под полной нагрузкой и торможение, а также стоянку исполнительного двигателя под током в течение 0, 5 мин. Контроллерные схемы управления. Эти схемы используются при мощности исполнительного двигателя до 10 кВт (реже — до 25 кВт). Контроллерные схемы, предназначенные для электроприводов небольшой мощности, отличаются простотой и надежностью работы, малым весом и небольшими габаритами, а также сравнительной дешевизной. С увеличением мощности привода схемы становятся все менее надежными и более громоздкими. К числу недостатков этих схем относится и то, что они не обеспечивают: а) автоматического ограничения момента двигателя при отрыве якоря от грунта, что в установках большой мощности может вызвать поломки в механизме или обрыв якорной цепи (увеличение мощности всегда сопровождается уменьшением запаса прочности механизмов); б) Ограничения бросков пусковых и тормозных токов, что может явиться причиной кругового огня на коллекторе и короткого замыкания в щеточном механизме двигателя. Сказанное объясняет, почему контроллерные схемы управления требуют для своего обслуживания квалифицированного персонала. Применение релейно-контакторных схем в электроприводах большой мощности заставляет увеличивать число пусковых и регулировочных ступеней, в связи с чем возрастает количество аппаратов управления и соответственно снижается надежность работы установки. К тому же усложняется уход за ней. С увеличением мощности привода значительно возрастают вес и габариты оборудования и, в первую очередь, сопротивлений. Схема становится соизмеримой по весу с системой Г—Д. Электромашинные схемы управления. Система Г—Д удовлетворяет всем требованиям электропривода якорно-швартовного устройства в отношении плавности пуска, торможения и регулирования скорости в нужных пределах. Наличие лишь малого количества аппаратов управления и применение двух двигательных брашпилей делает электромашинные схемы высоко надежными в работе. Недостатком системы Г—Д является ее высокая стоимость, а при небольших мощностях — значительно больший вес и большие габариты по сравнению с другими схемами. Поэтому систему генератор—двигатель можно рекомендовать лишь для якорно-швартовных устройств, мощность электропривода которых превышает 50 кВт. 3.3 Анализ защиты электродвигателей Для того чтобы защитить электродвигатель от повреждений при нарушении нормальных условий работы, а также своевременно отключить неисправный двигатель от сети, предотвратив или ограничив тем самым развитие аварии, предусматриваются средства защиты. В зависимости от характера возможных повреждений и ненормальных режимов работы различают несколько основных наиболее распространенных видов электрической защиты асинхронных двигателей. Защита от коротких замыканий отключает двигатель при появлении в его силовой (главной) цепи или в цепи управления токов короткого замыкания. Аппараты, осуществляющие защиту от коротких замыканий (плавкие предохранители, электромагнитные реле, автоматические выключатели с электромагнитным расцепителем), действуют практически мгновенно, т. е. без выдержки времени. Защита от перегрузки предохраняет двигатель от недопустимого перегрева, в частности и при сравнительно небольших по величине, но продолжительных тепловых перегрузках. Защита от перегрузки должна применяться только для электродвигателей тех рабочих механизмов, у которых возможны ненормальные увеличения нагрузки при нарушениях рабочего процесса. Аппараты защиты от перегрузки (температурные и тепловые реле, электромагнитные реле, автоматические выключатели с тепловым расцепителем или с часовым механизмом) при возникновении перегрузки отключают двигатель с определенной выдержкой времени, тем большей, чем меньше перегрузка, а в ряде случаев, при значительных перегрузках, — и мгновенно. Защита от понижения или исчезновения напряжения (нулевая защита) выполняется с помощью одного или нескольких электромагнитных аппаратов, действует на отключение двигателя при перерыве питания или снижении напряжения сети ниже установленного значения и предохраняет двигатель от самопроизвольного включения после ликвидации перерыва питания или восстановления нормального напряжения сети. Специальная защита асинхронных электродвигателей от работы на двух фазах предохраняет двигатель от перегрева, а также от «опрокидывания», т. е. остановки под током вследствие снижения момента, развиваемого двигателем, при обрыве в одной из фаз главной цепи. Защита действует на отключение двигателя. В качестве аппаратов защиты применяются как тепловые, так и электромагнитные реле. В последнем случае защита может не иметь выдержки времени. Аппараты электрической защиты могут осуществлять один или сразу несколько видов защит. Так, некоторые автоматические выключатели обеспечивают защиту от коротких замыканий и от перегрузки. Одни из аппаратов защиты, например плавкие предохранители, являются аппаратами однократного действия и требуют замены или перезарядки после каждого срабатывания, другие, такие как электромагнитные и тепловые реле, — аппараты многократного действия. Последние различаются по способу возврата в состояние готовности на аппараты с самовозвратом и с ручным возвратом. Выбор и описание схемы
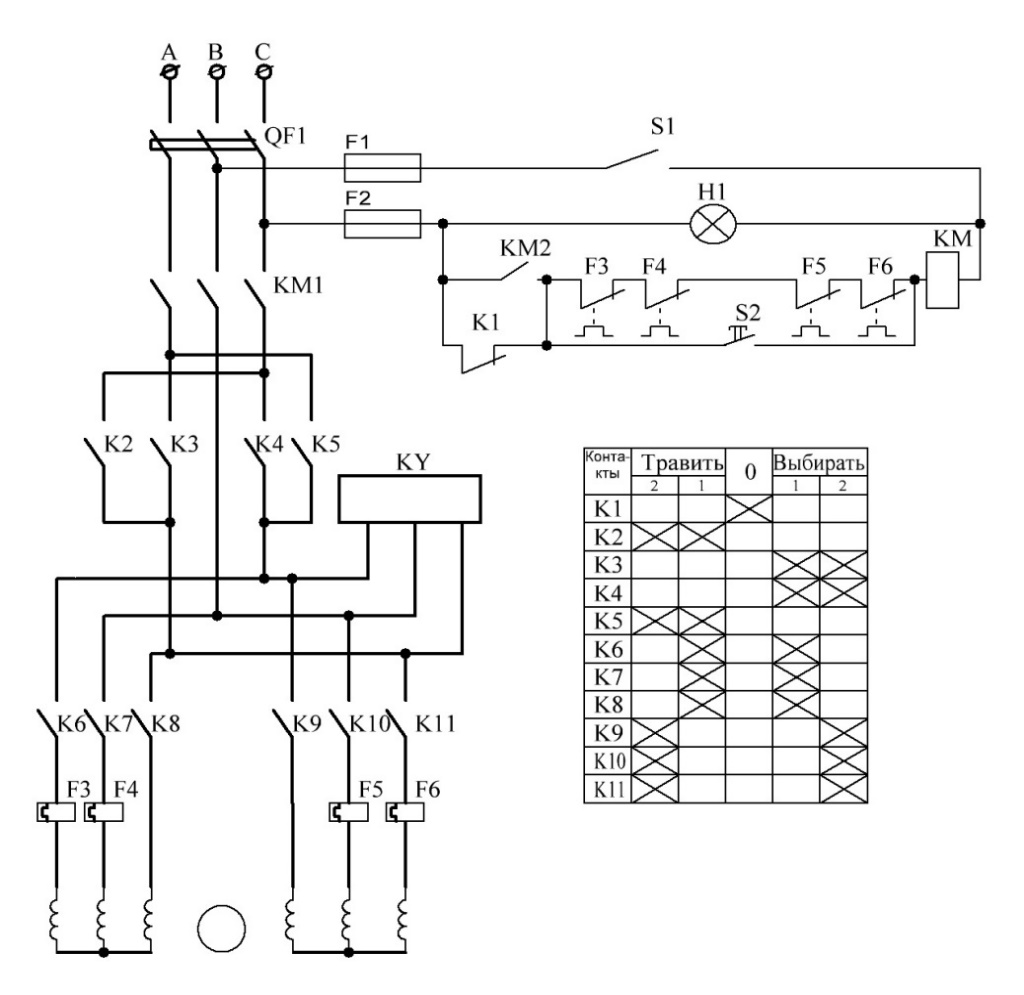
Рис. 3.3.1. Схема работы электропривода Работой электропривода управляют с помощью контроллера. При повороте пакетного выключателя S1 получает питание катушка линейного контактора KM, контактор замыкает главные контакты KM1 в цепи статора двигателя и вспомогательный контакт KM2, шунтирующий контакт K1 контроллера. Загорается сигнальная лампа H1. Схема подготовлена к пуску. При повороте рукоятки (маховика) контроллера в положение 1, например «Выбирать», размыкается контакт K1 и замыкаются контакты K2, K5, K6, K7 и K8 контроллера. Двигатель подключается к сети, начинает вращаться и выбирать якорь с малой скоростью. При переводе рукоятки (маховика) контроллера в положение 2 контакты K2 и K5 останутся замкнутыми, разомкнутся контакты K6, K7 и K8 и замкнутся K9, K10 и K11 контроллера. Произойдет переключение фаз обмотки статора со схемы малой частоты вращения на схему большой частоты вращения. Чтобы изменить направление вращения двигателя, рукоятку контроллера поворачивают в обратном направлении в положение 1 «Травить». В этом положении вместо контактов K2 и K5 замкнутся контакты K3 и K4. Произойдет переключение фаз, и направление вращения двигателя изменится. Скорости (число пар полюсов) переключаются в том же порядке: в положении 1 рукоятки контроллера замкнуты контакты K6, K7 и K8 и фазы обмоток статора включены по схеме малой частоты вращения; в положении 2 рукоятки контроллера замкнуты контакты K9, K10 и K11 и фазы обмотки статора включены по схеме большой частоты вращения. В схеме предусмотрена защита двигателя от перегрузки с помощью тепловых реле F3-F6. При необходимости работы электропривода в условиях перегрузки контакты тепловых реле шунтируются нажатием кнопки S2. Нулевая защита осуществляется линейным контактором KM, защита от токов короткого замыкания – автоматическим выключателем QF1. Предохранители F1, F2 защищают цепь управления от токов короткого замыкания. Схема предусматривает: · пуск, реверсирование и остановку двигателя · работу на малой и большой скорости (в положениях «Травить» и «Выбирать») · торможение – с помощью дискового электромагнитного тормоза KY
ЗАКЛЮЧЕНИЕ В курсовом проекте был произведен расчет электропривода якорно-швартового устройства судна. Были выбраны якоря, рассчитаны тяговые усилия и моменты на валу электродвигателя. Был выбран электродвигатель МАП421-4/8ОМ1 и произведена его проверка на продолжительность съема судна с якоря, на нагрев и максимальную скорость при отдаче якоря. Так же выбрана схема управления электроприводом якорно-швартового устройства судна. В ходе расчета все показатели получены в пределах указанных в регистре РФ. Конечная проверка двигателя на нагрев показала, что электропривод идеально подходит для данного якорно-швартового устройства. Цель курсового проекта достигнута.
СПИСОК ЛИТЕРАТУРЫ 1. Чекунов К.А. «Судовые электроприводы и электродвижение судов» -М., 1986. – 352 с. 2. Копылов И.П. «Электрические машины» -М., 2002. – 608 с. 3. Качман М. М. «Электрические машины и электропривод автоматических устройтсв» -М., - 157 с. 4. Ягодкин В.Я.. Электроприводы судовых грузоподъемных механизмов. СПб: ГМА им. Макарова, 2004 5. Фираго Б.И., Павлячик Л.Б.. Регулируемые электроприводы переменного тока. М.: Техноперспектива, 2006 6. Белов М.П., Новиков В.А., Рассудов Л.Н.. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. М.: Академия, 2007 7. Москаленко В.В.. Системы автоматизированного управления электропривода. Издательство: Инфра-М, 2007 8. Белов М.П., Зементов О.И., Козярук А.Е.. Инжиниринг электроприводов и систем автоматизации. М.: Академия, 2006 9. Гульков Г.И., Петренко Ю.Н., Раткевич Е.П.. Системы автоматизированного управления электроприводами. Новое знание (Минск), 2007 10. Регистр России. Правила классификации и постройки морских судов Л., «Транспорт», 1990 г. 11. Судовые электроприводы. Справочник в 2 тт. под ред. Богословского А.П. Л., «Судостроение», 1983 г. СОДЕРЖАНИЕ Введение ТЕОРЕТИЧЕСКАЯ ЧАСТЬ 1.1. Назначение и основные элементы якорно-швартовых устройств ...........3 1.2. Требования Регистра РФ .........................................5 1.3. Режимы работы якорно-швартового устройства........................7 РАСЧЕТНАЯ ЧАСТЬ 2.1. Расчет и выбор двигателя якорно-швартового устройства................9 2.2. Расчет и построение механической характеристики МАП 421-4/8ОМ1 .....17 2.3. Расчет и построение нагрузочной характеристики МАП 421-4/8ОМ1 ......21 2.4. Расчет и построение механической характеристики МАП 422-4/8ОМ1 .....22 2.5. Расчет и построение нагрузочной характеристики МАП 422-4/8ОМ1 ......26 АНАЛИТИЧЕСКАЯ ЧАСТЬ 3.1. Выбор двигателя и анализ технико-экономической части................29 3.2. Анализ систем управления.......................................29 3.3. Анализ защиты электродвигателей.................................31 3.4. Выбор и анализ схемы, описание работы схемы.......................33 ЗАКЛЮЧЕНИЕ. ............................................ 35 СПИСОК ЛИТЕРАТУРЫ. .....................................36
ВВЕДЕНИЕ Электропривод представляет собой электромеханическую систему, состоящую из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенную для приведения в движение исполнительных органов рабочей машины и управления этим движением. Современное машинное устройство или, как его называют иначе, производственный агрегат состоит из большого числа разнообразных деталей, отдельных машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Необходимо хорошо знать назначение отдельных элементов, составляющих машинное устройство, так как без этого невозможно правильно обслуживать ее в эксплуатации. Цель курсового проекта – рассчитать электропривод якорно-швартового устройства судна. Для этого необходимо: выбрать якоря и якорные цепи, рассчитать тяговые усилия и моменты на валу, по полученным расчетным данным выбрать подходящий двигатель, построить механическую и электромеханическую характеристику, а также построить нагрузочные диаграммы и выбрать схему управления электроприводом якорно-швартового устройства судна.
ТЕОРИТИЧЕСКАЯ ЧАСТЬ В состав якорно-швартовного устройства входят якоря, якорные цепи, якорно-швартовная лебедка, исполнительный двигатель и система управления. Якоря. В настоящее время чаще всего применяют якоря с поворотными лапами (якоря Холла), которые обладают большой держащей силой, легко укладываются по-походному и состоят из небольшого числа грубо обработанных деталей. Каждое судно снабжают двумя или тремя так называемыми становыми якорями, расположенными в носовой части судна. Третий якорь считается запасным и носит название штормового. Количество и массу становых якорей и цепей определяют по таблицам в зависимости от так называемой характеристики якорного снабжения судна: где - весовое водоизмещение судна при осадке по летнюю грузовую марку, т.; В - ширина судна наибольшая, м h - высота от летней грузовой ватерлинии до верхней кромки настила палубы самой.высокой рубки, м; А - площадь парусности в пределах длины судна L, определяется по диаметральной плоскости судна в пределах от летней грузовой ватерлинии, м2. Якорные цепи. Роль гибкой связи, соединяющий якорь с судном, выполняют якорные цепи (цепные канаты). Якорная цепь состоит из отдельных частей – смычек длиной от 20 до 25 м. Звенья якорной цепи имеют распорки (контрфорсы), что увеличивает их прочность примерно на 20 %.
Общую длину и калибр якорной цепи определяют по указанной выше характеристике якорного снабжения Nc. Под калибром d принято понимать диаметр ценного железа, который колеблется в переделах от 30 до 100 мм. Калибр цепи находят по таблицам или легко определяют (в миллиметрах) по формуле:
где Применение цепей в качестве якорного каната обуславливается следующими причинами. Метр цепи весит в 5 – 6 раз больше метра равнопрочного стального троса той же длины, благодаря этому якорные цепи обеспечивают получение значительно большей держащей силы. Буферные свойства цепи уменьшают размах килевой качки и меньше подвержены коррозии в морской воде. Якорно-швартовные лебедки. Для отдачи и подъема якоря, а также для швартовных операций служат якорно-швартовные лебедки: шпили и брашпили, различающиеся тем, что у первых ось кулачкового барабана расположена вертикально, а у вторых – горизонтально. И те, и другие располагают в носовой части судна, но брашпили вместе с основной частью электрооборудования устанавливают на палубе и почти не занимают внутренних помещений. Эта особенность обеспечила им широкое распространение на судах торгового флота. У шпилей на палубе размещают лишь якорно-швартовный барабан и тумбу управления. Все остальное оборудование находится в подпалубных помещениях судна. Брашпиль обычно приводится в движение трехскоростным асинхронным двигателем типа МАП. В настоящее время шпили и брашпили выполняют с не самотормозящимися червячными редукторами, что объясняется желанием
повысить КПД установки. На крупных судах устанавливают два якорно-швартовных шпиля – по числу якорей. На мелких судах один шпиль используют для поочередного подъема обоих якорей. Электропривод якорно-швартовных устройств служит для подъема и опускания якорей, а также для подтягивания судна к берегу при выполнении швартовных операций. На стоянках глубиной свыше 50 м скорость опускания якоря регулируют электродвигателем, который разгоняясь, переходит в режим рекуперативного торможения. 1.2 Требования Регистра РФ Якорное снабжение 1. Мощность приводного двигателя якорного механизма должен обеспечивать непрерывное выбирание в течение 30 мин. одной якорной, цепи со скоростью не менее 0, 15 м/с при тяговом усилии, определяемом по формуле:
где а - коэффициент, равный 36, 8 - для цепей категории 1 41, 7 - для цепей категории 2 46, 6 - для цепей категории 3 d-колибр якорной цепи 2. При подходе якоря к клюзу привод должен обеспечивать скорость выбирания цепи не более 0, 17 м/с. Рекомендуемая скорость втягивания якоря в клюз не более 0, 12 м/с 3. Для отрыва якоря от грунта привод якорного механизма должен обеспечивать в течение 2мин. создание в цепи на одной звездочке, тягового усилия не менее 1, 5 расчетного 4. Цепные звездочки должны иметь не менее пяти кулачков. Для звездочек с горизонтальным расположением оси угол охвата цепью должен быть не менее 115°, а с вертикальным расположением оси не менее 150°.
5. На посту дистанционного управления должен быть предусмотрен счетчик длины вытравленной цепи и указатель скорости травления цепи с отметкой предельно допустимой скорости 3м/с. Электрический привод 1. При применении электродвигателей переменного тока К.З. ротором электроприводы ЯШУ после 30 мин. работы при номинальной нагрузке должны обеспечивать возможность стоянии под током электродвигателя при номинальном напряжении в течение 30 сек. для якорных механизмов и 15 сек. для швартовных. Для двигателя с переключаемыми полюсами эти требования для работы с обмоткой, создающей наибольший пусковой момент. Электродвигатели постоянного тока и переменного с фазным ротором должны выдерживать указанный выше режим стоянки под током, но при моменте в 2 раза превышающем номинальный. Причем напряжение может быть ниже номинального. После режима стоянки превышение температуры должно быть не более 130% допустимого значения для примененной изоляции. 2. Если привод механизма может развивать момент, создающий усилие на звездочке более 0, 5 пробной нагрузки якорной цепи, то должна быть предусмотрена защита от превышения указанной нагрузки, устанавливаемая между приводом и механизмом. Швартовные механизмы 1. Привод швартового механизма должен обеспечивать непрерывное выбирание швартового троса при номинальном тяговом усилии с номинальной скоростью в течение не менее 30 мин. 2. Для швартовых устройств при номинальной нагрузке скорость не должна превышать 0, 3 м/с.
3. При расчетном режиме работы швартового механизма его привод должен обеспечивать в течение 2 мин создание в тросе на первом слое навивки на барабане тягового усилия не менее 1, 5 расчетного. 4. Автоматические лебедки должны иметь ручное управление для возможности осуществления неавтоматического режима работы. 5. Должны быть предусмотрены: а) Звуковая предупредительная сигнализация, срабатывающая при максимально допустимой длине вытравленного троса. б) Указатель фактического тягового усилия действующего в швартовом тросе при автоматическом режиме работы. Режимы работы якорно-швартового устройства Работа ЯШУ регламентируется требованием морского Регистра и при ежегодных осмотрах производится освидетельствование инспектором Регистра ЯШУ с последующим разрешением на его дальнейшую эксплуатацию. В качестве якорных механизмов на судах применяются брашпили и якорные шпили. Расчет электроприводов выполняется для того, чтобы по его результатам осуществить выбор исполнительных двигателей и других машин и аппаратов управления. Расчет производят на основании данных якорного снабжения судна, по которым выбирают якорно-швартовую лебедку, глубину стоянки и другие исходные данные. Основным режимом работы электропривода якорно-швартового устройства принято считать подъем одного якоря с нормальной глубины. Расчет электропривода для этого случая выполняют по стадиям съемки судна с якоря. Порядок расчета таков; 1. Определяют моменты статического сопротивления для каждой стадии и каждого возможного режима работы электропривода. Находят расчетное значение момента на валу двигателя. 2. Выбирают нужный тип двигателя и по каталогу находят его основные данные. 3. Выбранный двигатель проверяют на продолжительность съемки судна с якоря и на нагрев в процессе работы. 4. Иногда двигатель проверяют на соответствие условиям швартовки судна и на максимально допустимую скорость разгона при сбросе якоря на большой глубине.
РАСЧЕТНАЯ ЧАСТЬ |
Последнее изменение этой страницы: 2019-04-19; Просмотров: 1138; Нарушение авторского права страницы

 ,
,  - масса якоря, кг.
- масса якоря, кг.

 коэффициент для цепей 1 категории прочности, электросварные обыкновенные
коэффициент для цепей 1 категории прочности, электросварные обыкновенные коэффициент для цепей 2 категории прочности, электросварные или литые повышенной прочности
коэффициент для цепей 2 категории прочности, электросварные или литые повышенной прочности коэффициент для цепей 3 категории, цепи особой прочности.
коэффициент для цепей 3 категории, цепи особой прочности.
 [Н∙ м]
[Н∙ м] [Н∙ м]
[Н∙ м] [Н∙ м]
[Н∙ м]
 [р/с]
[р/с] [р/с]
[р/с] [р/с]
[р/с] [р/с]
[р/с] КВт
КВт