
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
На проект по курсу «Детали машин» привод УИПАСтр 1 из 2Следующая ⇒
Задание №6 На проект по курсу «Детали машин» привод УИПА I Кинематическая схема II Исходные данные
График нагрузки
Определение силовых и кинематических параметров привода
Мощность на валу рабочего органа P=2FeV/1000, где F – эквивалентная сила сопротивления
Fe=Fmax-Ke, где Ke – коэффициент эквивалентной нагрузки
Fe=Kt∙ Ke=18∙ 0, 82=14, 76 kH P=2∙ 14, 76∙ 103/60∙ 1000=5, 9 кВт
КПД привода: n=n1∙ n2∙ n3∙ n42, где n1 – КПД муфты=0, 99 n2 n3 – КПД цилиндрической передачи=0, 97 n4 – КПД пыра подшипников=0, 99
n=0, 99∙ 0, 8∙ 0, 97∙ 0, 99=0, 475
Mощность двигателя Pдв=P/n=5, 9/0, 475=7, 9 кВт Принимаем двигатель n1 132 ММУЗ Мощность двигателя Pдв=11 кВт Частота вращения пд=1455 мин-1 Передаточное число привода: и=пу/пвых где: пвых=V/ПД=12/3, 14∙ 0, 28=13, 64 мин-1
и=1455/13, 64=105, 7
Принимаем передаточное число цилиндрической передачи и1=и2=и Передаточное число быстроходной передачи Иб=и/ит=106, 7/4=26, 6 Принимаем и1=4в=2S Крутящий момент на валу двигателя
Т1=9550 ∙ Рчв/пчв=9550 ∙ 11/1455-72, 2Нм
Моменты на последующих валах
Т2=Т1∙ и1∙ п1∙ п2∙ пи=72, 2∙ 25∙ 0, 99∙ 0, 8∙ 0, 99=14+4 Нм Т3=Т2∙ и2∙ п3∙ п4=1415∙ 0, 99∙ 4∙ 5434 Нм
Частота вращения валов
n2= n1/ и1=1455/25=58, 2 мин-1 n3= n2/ и2=58, 2/4=14, 9 мин-1 Выбор материала червячной пары Скорость скольжения в зоне контакта
По таблице 3.1 принимаем материал венца червячного колеса, бронзу БРР10 Ф Механические свойства δ =275 мПа; δ т=200 мПа
Допускаемые напряжения
Эквивалентное число циклов перемен напряжений по контакту
N He2=60∙ п2 lh Σ km1; 3∙ t=60∙ 58, 2∙ 12000(13∙ 0, 2+0, 83∙ 0, 65+0, 453∙ 0, 15)=2.29∙ 107 по изгибу N Fe2=60∙ п2 ch: Σ 4m19∙ t1=60∙ 58, 2∙ 12000(13∙ 0, 2+0, 89∙ 0, 65+0, 459∙ 15)=12∙ 107
Коэффициент долговечности по контактным напряжениям изгиба
Коэффициент долговечности по контактным напряжениям
Допускаемое контактное напряжение δ HP2=0, 9бв kul=0, 9∙ 275∙ 0, 9=222 мПа
Предельное допускаемое контактное напряжение
(δ HP2)max=4δ T2=4∙ 200=800 мПа
Предельное допускаемое контактное напряжение
(δ HP2)max=δ FpH2=0, 8δ r2=0, 8∙ 200=160 мПа
Допускаемое напряжение изгиба
δ HP2=0/6 δ b2∙ RFl=0, 16∙ 275∙ 0, 76=33, 4 мПа
По таблице3.4 принимаем число винтов червяка Z=2 Расчет червячной передачи Число зубьев червячного валика
Z2=Z1∙ u=2∙ 25=50
Ориентировочное значение коэффициента диаметра червяка
д1=0, 25∙ Z2=0, 27∙ 50=12, 5
Отношение среднего по времени момента к рабочему:
mp=Σ k1m: t1=0, 2+0, 8∙ 0, 65∙ 0, 45∙ 0, 15=0, 787
3.3 Коэффициент деформации червяка по табл. 3.5 Q=121 Коэффициент неравномерности распределения нагрузки
KHB=1+(Z2/Q)3(1-mp)=1+(50/121)3∙ (1-0, 787)=1, 015
Коэффициент динамичности KHХ=1, 1
Межосевое расстояние
Принимаем dw=200мн 3.6 Предварительное значение модуля:
m=2aw/g+Z2=2∙ 200/12, 5∙ 50> 6, 4 мм
Принимаем m=6.3
Коэффициент диаметра червяка
g=2aw/m-Z2=2∙ 200/6, 3-50=13, 5
Принимаем g=12, 5
3.8 Коэффициент диаметра смещения червяка:
x=2aw/m-Z2+9/2=200/6, 3-50+12, 5/2=0, 496
Контактное напряжение на рабочей поверхности зуба червячного колеса
где Ev – приведенный модуль упругости=1, 26
Предельное контактное напряжение на рабочей поверхности зуба
Угол подъема вышки червяка
Приведенное число зубьев червячного колеса
7V2=72/cosγ =50/cos39, 09=51, 9
3.13 По табл. 3.6 выбираем коэффициент формы зуба колеса
YF2=1, 44
Коэффициент неравномерности распределения нагрузки и динамичности
KEP=KHP2 1, 015 KFV=KV=1.1
Напряжение изгиба и точил зуба червячного колеса
GFH2=1500T2∙ YT2∙ KFP∙ Kkp∙ cosα /22∙ g∙ m3=20, 5< GFP2=33, 4 мПа
Предельное напряжение изгиба у ножки зуба
GFH2=β =Gf2=1, 8∙ 20, 5=36, 9 мПа= GFH2=160 мПа Расчет геометрии червячной передачи Длительные диаметры
d1=mφ =6, 3∙ 12, 5=78, 75 мм d2=mz2=6, 3∙ 50=315 мм
Диаметры вершин
da1=d1+2ha∙ m=78, 75+2∙ 6, 3=91, 35 мм da2=d2+2(ha+x) ∙ m=315+2∙ (1+0, 496) ∙ 6, 3=333, 8 мм
Наибольший диаметр червячного колеса
dam2=da2+bm/2+2=333, 8+6, 3∙ 6/2+4=343, 25 мм Принимаем da2=344мм
Высота витка червяка
h1=h∙ m=2, 2∙ 6, 3=13, 86 мм
Расчет диаметра впадин
d cp1=da1-2h=72, 5-2∙ 13, 86=44, 78 мм d cp2=da2-2(ha+C+x)m=315∙ 2(1+6, 2+0, 496) ∙ 6, 3=311, 6 мм
Принимаем da2=343 мм
Длина нарезной части червяка
b0=(12+0, 1Z2)m=(n+0, 1∙ 50) ∙ 6, 3=100, 8 мм
для исследованного червяка: b1> b10+4m=100, 8+4, 63=126 мм
Окружная скорость червяка
V1=Пd1-П1/60∙ 103=3, 14∙ 78, 75-1455/60∙ 103=6 м/с
Скорость скольжения
VS=V/cosγ =6/cos9, 09=6, 08 м/с
5.3 По табл. 10 выбираем угол трения ρ ∙ ρ =1.15 коэффициент потерь в зацеплении
φ =1-tg8/tg(4+5)=1-tg9, 04/tg19, 09+1, 15=20, 14
5.4 Определить относительные потери в уплотн. по табл. 31:
φ у=0, 055
КПД червячной передачи
n=1- φ 3- φ y=1-0, 114-0, 055=0, 837
Радиальные силы Допустимые напряжения Угол профиля
hf=arctg(tg2/cosB)=arctg(tg200/cos200)=21, 1730 Межосевое расстояние
Принимаем dm=315 315 мм
Модуль зацепления
Принимаем m=5мм
ZC=2aw∙ cosβ /w=2∙ 315∙ cos20/5=118, 4
Принимаем ZC=118
Z1=Z1/U+1=118/U+1=23, 6
Принимаем Z1=24 Число зубьев колеса
Z2=ZC-Z1=118-24=94
Передаточное число
U=Z2/Z1=94/24=3, 917 Δ U=Σ (4∙ 3, 92)14y∙ 100%=2, 08%< 4%
Угол зацепления
dtω =arcos(a/aw∙ cosα t) ∙ arccos(313, 93/315∙ cos21, 173)=21, 67
Значение
invα tω =tgdecos-α ω =tg21, 67-21, 67/180π =0, 01912 invα t=tgα t-dt=tg21, 173-21, 173/180π =0, 01770
Коэффициент суммы смещения
Делительный диаметр
d1=mt/cosβ 1=5, 24/cos20=127, 7мм d2=mt2/cosβ 1=5, 94/cos20=500, 16мм
Диаметр вершины
da1=d1+2∙ (1+x1- Δ y) ∙ m=127, 7+2∙ (1+0, 216∙ 0, 003) ∙ 5=137, 7 мм da2=d2+2∙ (1+x2- Δ y) ∙ m=500, 16+2∙ (1+0, 003 ∙ 0) ∙ 5=510, 16 мм
Диаметр основной окружности db1=d1∙ cos2t=127, 7∙ cos21, 173=119, 08 мм
Начальные диаметры
dw1=2aK1/U+1=2∙ 315/3, 917+1=128, 14 мм dw2=dw1∙ U=128, 14∙ 3, 92=501, 86 мм Окружная скорость
V=Tdw1∙ m/60∙ 103=128, 14∙ 58, 2/60∙ 103=0, 39 м/с
Окружная динамическая сила
Удельная окружная сила
WHT= FHT/ bw2∙ KHα ∙ KFB∙ KHV=11035/78∙ 1, 06∙ 1, 1∙ 1, 003=164H/мм WFT= FKB/ bw2∙ KFα ∙ KFB∙ KFV=11073/78∙ 1, 2∙ 1, 23∙ 1, 006=211H/м2 Эквивалентное число зубьев
ZV1=Z1/cos3B=24/cos3200=28, 9 ZV2=Z2/cos3B=94/cos3200=113, 3
Коэффициенты формы зуба
YF1=3, 63; YF2=3, 6
Направление изгиба
Контактные напряжения
Компоновка редуктора
Последовательно определяем диаметры валов по формуле:
Толщина спинки корпуса редуктора
V=0, 025dw+3=0, 025∙ 315+3=10, 8 мм
Принимаем V=12мм Диаметр болтов:
d1=0, 003wT+R=0, 003-315+12=21, 45 мм
Принимаем d1=24 мм
d1=16 мм, d3=12 мм
Расчет входного вала: Исходные данные:
Ft=1728H; F2=3268H; F0=8978H d=78, 75мм; T=72, 2Hм
Момент возникающий
Мн=0, 17=0, 1∙ 72, 2=7Нм
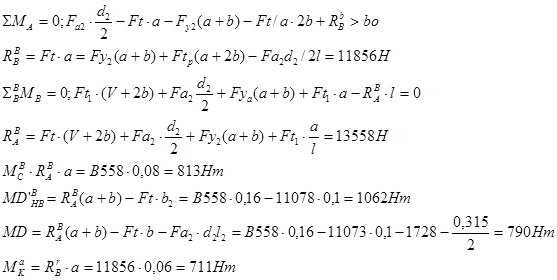
Определение опорных реакций и изгибающих моментов Вертикальная плоскость
Горизонтальная плоскость
Суммарные изгибающие моменты
Принимаем материал вала сталь 40х
Gg< 900мПа; [G-l]=80мПа
Определим диаметры вала в сечении Д Приведенный момент
Расчетный диаметр вала
Диаметр впадин червяка dt1=44, 78> 392 мм Расчет промежуточного вала
Исходные данные
Ft1=11073H; Fy1 =4289H; Fa1=4030H; d1=127, 2 мм Ft2=80, 78H; Fy1 =3269H; Fa1=1728H; d1=315 мм Т=707 мм
Определим опорные реакции изгибающих моментов. Вертикальная плоскость
Горизонтальная плоскость
Проверочный расчет вала на выносливость Материал вала сталь 40х
ТВ=900мПа; Т1=450мПа; Σ =250мПа; ψ 0=0, 1. Сечение I-I
Эффективные коэффициенты концентрации нарушений от шпоночного газа по табл. 5.12 [2]
Ka=2, 15: KT=2, 05
Масштабный коэффициент табл. 5.16[2]
Er=ra=0, 6
Коэффициент состояния поверхности
KCr=Kru=1, 15 KCD=KE+KT-1/Eζ =2, 05+1, 15-1/0, 64=3, 59 Kζ D=Kζ +KTr-1/Eζ =2, 05+1, 15-1/0, 64=344
Эффективные коэффициенты напряжений от посадки границы колеса по табл. 5.15[2]
KAD=4, 5; KJD=3, 16
Окончательных принимаем: KED=451 KKD=3, 44 Осевой и номерный момент по табл. 5.9[2] W0=89100 ммВ Напряжение изгиба и кручения
Коэффициент запаса прочности
Расчет выходного вала
Исходные данные:
Ft=18000H; Ft=11073H; Ft=4289H Fa=4030H; d=500, 16 мм; T=2717мм
Определение опорных реакций и изгибающих моментов Вертикальная плоскость
RaB=RBB=Ft1=11073H MCB=MDB=RAB∙ a=-4073-0, 085=-941Hm
Горизонтальная плоскость
RBr=Ft∙ Ft1=18000-4282=13711H MBr=-F2∙ c=-18000∙ 0, 16=2280Hm MCr=-F2∙ (c+a)+RBr∙ a=-18000∙ 0, 245+1374∙ 0, 085=-3245Hm MCHr=-Ft(c+a)+RAr∙ a+Fa1∙ d/2=-18000∙ 0, 245+13711∙ 0, 085+4030∙ 500, 16∙ 10-3/2=-2237Hm
Суммарные изгибающие моменты
Принимаем материал вала сталь45
Ев=600мПа; [Т-1]=55мПа Определяем диаметр вала в сечении Приведенный момент
Расчетный диаметр вала
Подбор смазки для редуктора
Сорт масла выбираем по окружной скорости колес по формуле
Δ =2T/DT=0, 39 м/с
и по контактным напряжениям в зубе шестерни [I]=496 мПа По таблице рекомендуемых сортов смазочных масел выбираем масло
U – F – A – 68 ГОСТ17-47 94-87
Объем масла, заливаемого в редуктор рассчитывается по формуле:
Uмасла=Рбв∙ 0, 35=11∙ 0, 35=3, 15 л Задание №6 на проект по курсу «Детали машин» привод УИПА I Кинематическая схема II Исходные данные
График нагрузки
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-24; Просмотров: 221; Нарушение авторского права страницы





 ,
,  мПа< GHP=222мПа
мПа< GHP=222мПа мПа< (GHP2)max2=800 мПа
мПа< (GHP2)max2=800 мПа
 мм
мм мм
мм
 H/мм
H/мм мПа
мПа
 , где [Σ ] – допускаемое нарушение кручений=15…30мПа
, где [Σ ] – допускаемое нарушение кручений=15…30мПа Принимаем d=30мм
Принимаем d=30мм Принимаем d2=70мм
Принимаем d2=70мм Принимаем d3=100мм
Принимаем d3=100мм









 мм
мм