|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Алгоритм «оживления» решения по теме ⇐ ПредыдущаяСтр 2 из 2
«Плоское движение тел» и его реализация в Math cad
Методику создания анимационного клипа в системе Mathcad поясним на примере рассмотренной задачи, позволяющей наглядно представить: · положение отдельных тел в определенный момент времени; · траектории движения заданных точек механизма; · анимацию «оживление» механизма его тел и заданных точек. Алгоритм «оживления» механизма его тел и заданных точек предполагает исполнение следующих этапов: а) создание контуров точек тел механизма; б) создание контуров тел механизма; в) вызов объектов анимации в проекциях для изображения их в графическом редакторе системы Mathcad. Создание анимационного клипа, воспроизводящего движение механизма его тел и точек, осуществляется через меню системы: «Вид», «Анимация». При этом в окне меню системы Mathcad необходимо указать число фрагментов анимации, выделить область документа вместе с объектами, созданными в графическом редакторе, и «щелкнуть» по кнопке «Анимация», а затем сохранить клип в виде отдельного файла, присвоив ему имя. Пример создания анимационного клипа в системе MathCAD По задаче «Кривошипно-шатунный механизм с колесом»
Графический редактор Mathcad построит траектории движения точек, а также контуры тел и точек для заданной фрагментной переменной времени t2, если вызвать график и отложить по горизонтальной оси проекции векторов с индексом 0, (нулевой элемент вектора), а по вертикальной оси – с индексом 1. Затем в документе необходимо создать «знак видео клипа», оформив его как гиперссылку на файл видео клипа. «Щелкнув» по гиперссылке, воспроизвести анимацию, анализируя движение механизма его тел и заданных точек.
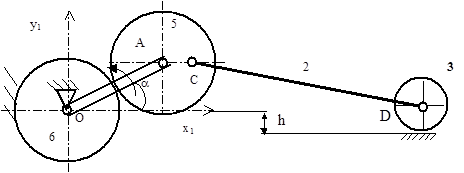
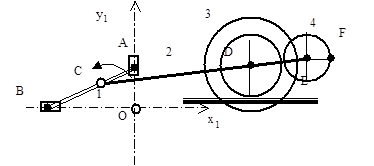
Варианты заданий по теме «Плоскопараллельное движение тел» Цель: освоить нетрадиционные методы решения задач плоскопараллельного движения тел с использованием численных методов и графики, в том числе анимационной, для решения и наглядного представления кинематики движения тел. В табл. 1.1 представлены две блок – схемы, из которых необходимо собрать систему тел. В табл. 1.2 дано их по вариантное сочленение. Направляющую для системы колес следует выбрать на уровне оси Х (варианты 1 – 8), выше оси Х (на высоте h= R4) – для вариантов 9 – 16 и ниже оси Х (h= R4) – для вариантов 17 – 32. Геометрические размеры всех тел механизма выбираются произвольно (по конструктивным соображениям). Угловая скорость ведущего звена – постоянна.
Таблица 1.1 Блок-схемы составной конструкции механизма
Продолжение таблицы 1.1 Окончание таблицы 1.1
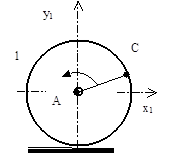
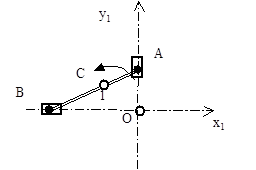
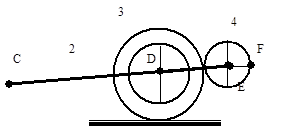
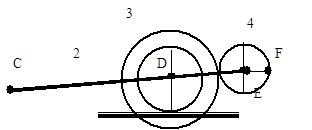
На рисунках 13 – 15 – приведены примеры системы тел.
Таблица 1.2 Варианты к выбору составной конструкции тел
Окончание таблицы 1.2 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-06-10; Просмотров: 136; Нарушение авторского права страницы