|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Система программного регулирования. ⇐ ПредыдущаяСтр 2 из 2
Программный регулятор(рис. 5.2) может изменять регулируемую величину по заданному закону без вмешательства оператора. Профиль кулачка 1, который имеет постоянную частоту вращения, соответствует закону изменения регулируемой величины. Толкатель 2 с роликом перемещается в вертикальном направлении в зависимости от профиля кулачка. К толкателю прикреплен движок реостата R, от положения которого зависит напряжение выхода. Временные программные механизмы используют в схемах автоматического пуска аварийных судовых электростанций. Программный механизм имеет на одном валу несколько кулачков, которые замыкают или размыкают контакты определенных электрических цепей согласно заданной программе. Такие устройства осуществляют подготовку дизеля к пуску, его пуск, переключение ответственных потребителей с шин главной электростанции на шины аварийной и др. Рис. 5.2. Программный регулятор Следящие системы.
На современных судах наиболее распространенным типом следящих систем является система воспроизведения угла, широко используемая в приборах управления судном и при ди- станционном управлении различными объектами. Отличительной особенностью следящих систем по сравнению с системами стабилизации является то, что в них объектом управления является элемент (сервомотор), который приводит в движение исполнительный орган объекта, подлежащего управлению. Рассмотрим систему регулирования угла поворота вала (отрабаты-вающей оси), управляемого двигателя (рис. 5.3). Поворотом задающего вала устанавливается задающее воздействие. Задающее устройство 3 соединено с задающей осью, а измерительное 2 - с отрабатывающей. Напряжение
Для повышения устойчивости работы системы применяется корректирующее устройство 7, состоящее из тахометрического генератора для измерения частоты вращения со вала двигателя и регулировочного (корректирующего) резистора RK. Напряжение коррекции ык, пропор - циональное частоте вращения со, подается в цепь сравнения и складывается с напряжением е. В статическом режиме при
Рис. 5.3. Система регулирования угла поворота вала Адаптивные (самонастраивающиеся) системы.
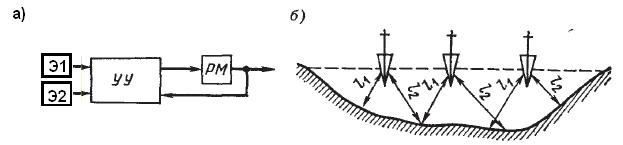
Термин «адаптация» заимствован из биологии, где он означает приспособление организма к изменяющейся среде.В автоматике этот термин имеет более узкий смысл. Примером самонастраивающейся системы может служить система, обеспечивающая проводку судна в узкостях по заданной глубине (рис. 5.4). В этой системе происходит непрерывное сравнение показаний двух эхолотов Э1 и Э2, измеряющих расстояния до двух участков l1, и l2 дна. Управляющее воздействие УУ после сравнения данных, поступающих от эхолотов, вырабатывает сигнал управления, который поступает на рулевую машину РМ. Рулевая машина, воздействуя на руль, заставит судно отклониться в направлении наибольшей глубины. Наилучшее качество регулирования получают в самонастраивающихся системах, которые обеспечивают минимальную динамическую ошибку, наименьшее время переходного процесса и т. п. Рис. 5.4 Система, обеспечивающая проводку судна по максимальной глубине: а — структурная схема; б — схема проводки
Популярное:
|
Последнее изменение этой страницы: 2016-08-24; Просмотров: 628; Нарушение авторского права страницы

 пропорционально углу
пропорционально углу  , а напряжение
, а напряжение - углу
- углу  Разность этих напряжений
Разность этих напряжений  по пепи 4 подается на усилитель 5, который питает обмотку якоря двигателя 1, 6. При любом несоответствии положения задающей и отрабатывающей осей в цепи усилителя появляется разность напряжений е. Вал двигателя будет вращаться до тех пор, пока угол отрабатывающей оси не станет равным углу поворота задающей оси и е не будет равно нулю и тока в якоре не будет.
по пепи 4 подается на усилитель 5, который питает обмотку якоря двигателя 1, 6. При любом несоответствии положения задающей и отрабатывающей осей в цепи усилителя появляется разность напряжений е. Вал двигателя будет вращаться до тех пор, пока угол отрабатывающей оси не станет равным углу поворота задающей оси и е не будет равно нулю и тока в якоре не будет. и
и  . В динамическом режиме, когда
. В динамическом режиме, когда  , корректирующая цепь замедляет разгон двигателя, однако при этом она несколько заглушает автоколебания в системе. Если на задающую ось установить штурвал, а к валу двигателя присоединить баллер руля, получится система управления судном. При повороте рулевого штурвала на угол
, корректирующая цепь замедляет разгон двигателя, однако при этом она несколько заглушает автоколебания в системе. Если на задающую ось установить штурвал, а к валу двигателя присоединить баллер руля, получится система управления судном. При повороте рулевого штурвала на угол