|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Двигатели последовательного возбуждения
Естественные скоростная и механическая характеристики, область применения. В двигателях последовательного возбуждения ток якоря одновременно является также током возбуждения: гв = 1а = /■ Поэтому поток Фа изменяется в широких пределах и можно написать, что Ф6 = £ ф/. (10-18) Коэффициент пропорциональности & ф в значительном диапазоне нагрузок, при / < /н, является практически постоянным, и лишь
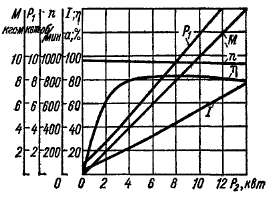
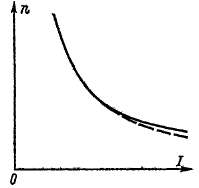
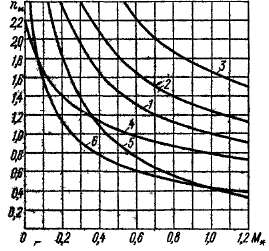
при / > (0, 8 н- 0, 9) /н вследствие насыщения магнитной цепи кф начинает несколько уменьшаться. При использовании соотношения (10-18) для двигателя последовательного возбуждения вместо выражений (10-7), (10-9) и (10-8) получим Скоростная характеристика двигателя [см. выражение (10-19)), представленная на рис. 10-11, является мягкой и имеет гиперболический характер. При & ф = const вид кривой п — f (/) показан штриховой линией. При малых / скорость двигателя становится недопустимо большой. Поэтому работа двигателей последовательного возбуждения, за исключением самых маленьких, на холостом ходу не допускается, а использование ременной передачи неприемлемо. Обычно минимально допустимая нагрузка Р2 = = (0, 2 -f- 0, 25)Рн. Естественная механическая характеристика двигателя последовательного возбуждения п = / (М) в соответствии с соотношением (10-20) показана на рис. 10-13 (кривая 1). Поскольку у двигателей параллельного возбуждения М ^ /, а у двигателей последовательного возбуждения приблизительно М~/! и при пуске допускается / = (1, 5 -г- 2, 0) /н, то двигатели последовательного возбуждения развивают значительно больший пусковой момент по сравнению с двигателями параллельного возбуждения. Кроме того, у двигателей параллельного возбуждения п яа const, а у двигателей последовательного возбуждения, согласно выражениям (10-19) и (10-20), приблизительно (при Ra = 0) Рис 10-11. Естественная скоростная характеристика двигателя последовательного возбуждения
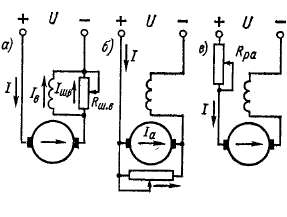
а у двигателей последовательного возбуждения Р2 = 2ппМ~ VM. Таким образом, у двигателей последовательного возбуждения при изменении момента нагрузки Мст = М в широких пределах мощность изменяется в меньших пределах, чем у двигателей параллельного возбуждения. Поэтому для двигателей последовательного возбуждения менее опасны перегрузки по моменту. В связи с этим двигатели последовательного возбуждения имеют существенные преимущества в случае тяжелых условий пуска и изменения момента нагрузки в широких пределах. Они широко применяются для электрической тяги (трамвай, метро, троллейбусы, электровозы и тепловозы на железных дорогах) и в подъемно-транспортных установках. Ruin ^ша Рис. 10-12. Схемы регулирования скоро- Отметим, что при повышении скорости вращения двигатель последовательного возбуждения в режим генератора не переходит. На рис. 10-11 это отражено в том, что характеристика п — f (/) оси ординат не пересекает. Физически это объясняется тем, что при переходе в режим генератора, при заданном направлении вращения и заданной полярности напряжения, направление тока должно изменяться на обратное, а направление э. д. с. Еа и полярность полюсов должны сохраняться неизменными, однако последнее при изменении направления тока в обмотке возбуждения невозможно. Поэтому Для перевода двигателя последовательного возбуждения в режим генератора необходимо переключить концы обмотки возбуждения. Регулирование скорости посредством ослабления поля. Регулирование п посредством ослабления поля производится либо путем шунтирования обмотки возбуждения некоторым сопротивлением ^ш.в (рис. 10-12, а), либо уменьшением числа включенных в работу витков обмотки возбуждения. В последнем случае должны быть предусмотрены соответствующие выводы из обмотки возбуждения. Так как сопротивление обмотки возбуждения 7? в и падение напряжения на нем малы, то #ш- в также должно быть мало. Потери
в сопротивлении Rm B поэтому тоже малы, а суммарные потери на возбуждение при шунтировании даже уменьшаются. Вследствие этого к. п. д. двигателя остается высоким, и такой способ регулирования широко применяется на практике. При шунтировании обмотки возбуждения ток возбуждения с величины / уменьшается до и скорость п соответственно увеличивается. Выражения для скоростной и механических характеристик при этом получим, если в равенствах (10-19) ~ и (10-20) заменим k& на k< s> k0 B, где
представляет собой коэффициент ослабления возбуждения. При регулировании скорости изменением числа витков обмотки возбуждения Ряс. 40-13. Механические характеристик» двигателя последовательного возбуждения при разных способах регулирования скорости вращения На рис. 10-13 показаны (кривые /, 2, 3) характеристики я = / (М) для этого случая р& < гулирования скорости при нескольких значениях & ов (значению k0 в = 1 соответствует есте* ственна'я характеристика /, kpr, =*= 0, 6 — кривая 2 и & о..я = 0, 3 — кривая 5). Характеристики д£ йьг в относительных единицах и соответствуют случаю, когда кф » const и Rax =0, 1. Регулирование скорости путем шунтирования якоря. При шун*и-ровании якоря (рис. 10-12, б) ток и поток возбуждения возрастают, а «скорость уменьшается. Так как падение иааряжеййя R^f майо Я поэтому можно принять- RB « 0, то сопротивление R^a щшт* чест находится под полным напряжением сети, еги ведший^' долина быть значительной, потери в нем оудут велики и к, *й. д. сильно уменьшится. Йроме того, шунтирование якоря эффективно только трр|й» когда магнитная цепь не насыщена. В связи с этим шунтирование якоря на практике используется редко.
На рис. 10-13 кривая 4 представляет собой характеристику n = f(M) при
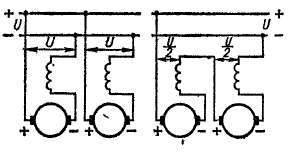
Рис. 10-14. Параллельное и последовательное включение двигателей последовательного возбуждения для изменения скорости вращения |
Последнее изменение этой страницы: 2017-03-17; Просмотров: 554; Нарушение авторского права страницы