|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
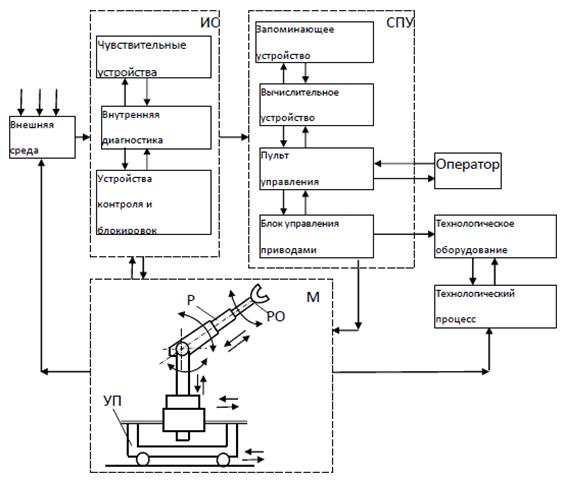
Состав и режимы работы роботов.
В состав ПР(производственного робота) входят следующие основные части: – манипулятор, или иначе механическая система робота; – информационная система (ИС); – система программного управления (СПУ), или иначе устройство управления; В совокупности информационная система и система программного управления образуют устройство автоматического управления (УАУ). Манипуляторы ПР содержат рабочий орган в виде захватного устройства (УЗ), сварочной головки, краскораспылителя и т.п. и механизмы, необходимые для выполнения всех его двигательных функций: – передаточные механизмы; – исполнительные механизмы; – приводы; – несущие элементы. Исполнительный механизм ПР с приводом и захватным устройством называют рукой манипулятора (Р). Для перемещения М относительно технологического оборудования (ТО) используются устройства передвижения (УП). Все манипуляционные устройства характеризуются маневренностью и коэффициентом сервиза (КС), под которым понимают возможность подхода РО к заданной точке с разных направлений. КС дает представление о двигательных возможностях М, т.е о его маневренности. Маневренность М – это число степеней подвижности при фиксированном положении РО, которая определяет возможность обхода манипулятором препятствий в рабочем объеме и способность к выполнению сложных операций. Движения М подразделяются на группы. Так, например, движения М, снабженного наиболее распространенным в ПР РО в виде УЗ бывают следующих видов: – ориентирующие перемещения УЗ, соизмеримые с его размерами; – транспортирующие перемещения, определяемые размерами звеньев руки и соизмеримые с размерами рабочего объема; – координатные перемещения на расстояния, превышающие размеры ПР и размеры рабочего объема. В состав ИС входят чувствительные (сенсорные) устройства внешней среды, система внутренней диагностики и устройства контроля и блокировок. ИС обеспечивает сбор, первичную обработку и перевод в СПУ данных о функционировании механизмов М робота и о состоянии внешней среды. СПУ предназначена для формирования и выдачи управляющих воздействий исполнительным механизмам М в соответствии с управляющей программой.
Под перепрограммируемыми устройствами СПУ понимают такие, которые обеспечивают изменение последовательности и (или) значений перемещений по степеням подвижности и управляющих функций на пульте управления. Это изменение управляющей программы может быть выполнено автоматически или при помощи оператора. СПУ содержит: пульт управления (ПУ), с помощью которого оператор осуществляет ввод и контроль задания; запоминающее устройство (ЗУ), в котором хранится вся необходимая информация, включая программы работ; вычислительное устройство (ВУ), реализующее алгоритм управления манипулятором; блок управления приводами (БУП) механизмов манипулятора. Из схемы видно, что ПР и ТО включены в единый цикл работы и содержат общий пульт управления всем ТП. Возможны два варианта режима работы ПР: режим программирования (режим обучения), при котором в запоминающее устройство вводится управляющая программа, и режим выполнения технологических операций (режим работы). 3. Практическая задача: Рассчитать основные характеристики идеального дифференцирующего звена, такие как: передаточная функция, комплексная частотная характеристика (КЧХ), амплитудно-частотная характеристика (АЧХ) и фазо-частотная характеристика (ФЧХ). Привести примеры данного типа элементарного динамического звена. Дифференциальное уравнение:
Передаточная функция:
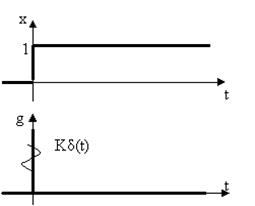
Переходная характеристика: Это дельта-импульс с площадью К. При постоянной входной величине выходная величина дифференцирующего звена равна нулю.
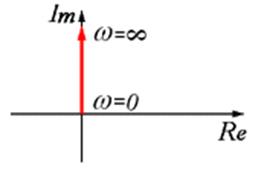
КЧХ:
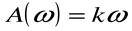
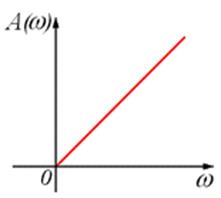
АЧХ:
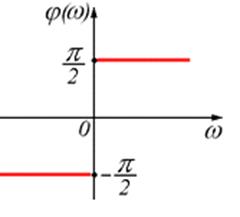
ФЧХ:
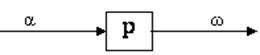
Примеры дифференцирующих звеньев Дифференцирующее звено является идеальным (физически нереализуемым) звеном. Это означает, что его нельзя реализовать искусственно. Однако такое звено может встретиться в модели объекта управления, когда две физические величины по своему определению связаны через производную. Примером таких величин могут быть угол поворота вала двигателя α и угловая скорость ω. По определению угловая скорость является производной угла:
Поэтому угол поворота может рассматриваться как входная величина, а угловая скорость – как выходная величина дифференцирующего звена (в данном случае К=1).
Также дифференцирующие звенья могут использоваться в случаях, когда не учитывается какое-то существенное свойство рассматриваемого объекта (при идеализированном его представлении).
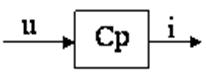
Рассмотрим идеальный конденсатор, обладающий только емкостью C и не обладающего активным сопротивлением R=0.
Таким образом, модель идеального конденсатора будет дифференцирующим звеном с передаточной функцией W(p)=Cp.
Билет 10 |
Последнее изменение этой страницы: 2017-04-12; Просмотров: 407; Нарушение авторского права страницы
 где
где  – дельта-функция;
– дельта-функция;