|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
|
|
Архитектура Аудит Военная наука Иностранные языки Медицина Металлургия Метрология Образование Политология Производство Психология Стандартизация Технологии |
Соединение тихоходный вал – полумуфта
Для выходного конца тихоходного вала при d=50 мм подбираем призматическую шпонку со скругленными торцами bxh=14x9 мм2 при t=5, 5мм. При l1=60 мм выбираем длину шпонки l=45мм. Материал шпонки – сталь 45 нормализованная. Проверяем напряжения смятия и условия прочности с учетом материала полумуфты – ст.3 ([s]см=110…190 Н/мм2) и Т2=748Н× мм:
Условие выполняется. Соединение тихоходный вал – ступица червячного колеса
Для соединения тихоходного вала со ступицей червячного колеса при d=71 мм подбираем призматическую шпонку со скругленными торцами bxh=20x12 мм2 при t=7, 5мм. При l1=32 мм выбираем длину шпонки l=32мм. Материал шпонки – сталь 45 нормализованная. Проверяем напряжения смятия и условия прочности с учетом материала ступицы чугуна СЧ20 ([s]см=70…100 МПа) и Т2=748Н× мм:
Условие выполняется. Выбранные данные сведены в табл.3. Таблица 3 Параметры шпонок и шпоночных соединений
Расчет валов по эквивалентному моменту Исходные данные для расчета
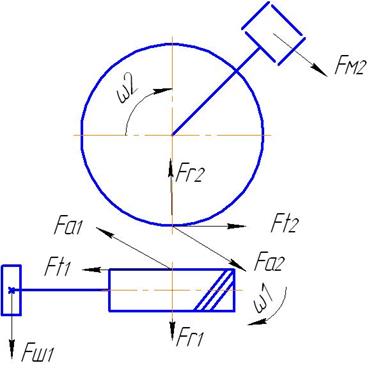
Составляем схему усилий, действующих на валы червячного редуктора (рис.7):
Рис.7 Схема усилий, действующих на валы червячного редуктора
Определяем консольную нагрузку на муфте [1, табл.6.2]: Для определения консольной нагрузки на шкиве необходимо произвести расчет зубчато-ременной передачи.[1]. Определяем минимальный диаметр ведущего шкива по диаметру вала электродвигателя Определяем минимальный диаметр ведущего шкива: d1= dДВ+h+10; d1min=50мм. Выбираем зубчатый ремень по ОСТ3805114-76 с модулем m=4, с трапецеидальной формой, шириной 84мм. Назначаем число зубьев ведущего шкива z=15. Определяем делительный диаметр ведущего шкива: d1=z x m d1=60мм. Определяем диаметр ведомого шкива: где u-передаточное отношение передачи, u=2, 2; Принимаем Определяем ориентировочное межосевое расстояние
Принимаем а=110мм. Определяем расчетную длину ремня: Принимаем l=550мм. Уточняем значение межосевого расстояния по стандартной длине ремня: Определяем угол обхвата ремнем ведущего шкива: Определяем скорость ремня: где [v]-допускаемая скорость, для зубчатых ремней [v]=25м/с. Определяем частоту пробегов ремня: где [U]=30м-1 – допускаемая частота пробегов. Определяем силу предварительного натяжения Fо ремня: где С – поправочные коэффициенты [3, табл.5.2]. Определяем консольную нагрузку на шкиве [3, табл.6.2]:
Для построения эпюр с учетом рис.5, данных табл.1 и пункта 7 определяем расстояния прилагаемых сил (рис.8).
Рис.8 Компоновочный эскиз вала Все выбранные данные сводим в табл.4. Таблица 4 Исходные данные для расчета валов
Расчет ведущего вала – червяка.
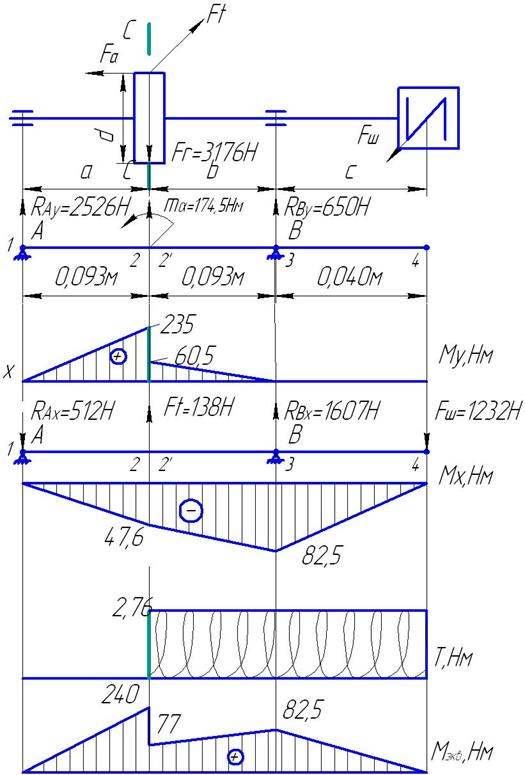
Заменяем вал балкой на опорах в местах подшипников. Рассматриваем вертикальную плоскость (ось у) Изгибающий момент от осевой силы Fа будет: mа=[Faxd/2]: mа=8725·40× 10-3/2=174, 5Н× м. Определяем реакции в подшипниках в вертикальной плоскости. 1å mАу=0 -RBy·(a+b)+Fr·a- mа=0 RBy=(Fr·0, 093- mа)/ 0, 186=(3176·0, 093-174, 5)/ 0, 186=649, 8Н Принимаем RBy=650Н 2å mВу=0 RАy·(a+b)-Fr·b- mа=0 RАy==(Fr·0, 093+ mа)/ 0, 186=(3176·0, 093+174, 5)/ 0, 186=2526, 2Н Принимаем RАy=2526Н Проверка: å FКу=0 RАy- Fr+ RBy=2526-3176+650=0 Назначаем характерные точки 1, 2, 2’, 3 и 4 и определяем в них изгибающие моменты: М1у=0; М2у= RАy·а; М2у=2526·0, 093=235Нм; М2’у= М2у- mа(слева); М2’у=235-174, 5=60, 5Нм; М3у=0; М4у=0; Строим эпюру изгибающих моментов Му, Нм. Рассматриваем горизонтальную плоскость (ось х) 1å mАх=0; Fш·(a+b+с)-RВх·(a+b)- Ft·a=0; 1232·(0, 093+0, 093+0, 067)-RВх·(0, 093+0, 093)-138·0, 093=0; RВх=(311, 7-12, 8)/0, 186; RВх=1606, 9Н RВх»1607Н 2å mВх=0; -RАх·(a+b)+Ft·b+Fш·с= 0; RАх=(12, 834+82, 477)/0, 186; RАх=512, 4Н RАх»512Н Проверка å mКх=0; -RАх+ Ft- Fш+ RВх=-512+138-1232+1607=0
Рис.9 Эпюры изгибающих и крутящих моментов ведущего вала Назначаем характерные точки 1, 2, 2’, 3 и 4 и определяем в них изгибающие моменты: М1х=0; М2х= -RАх·а; М2х=-512·0, 093=-47, 6Нм; М3х=- Fш ·с; М3х=-1232·0, 067=-82, 5Нм М4х=0; Строим эпюру изгибающих моментов Мх. Крутящий момент ТI-I=0; ТII-II=T1=Ft·d1/2; ТII-II=2, 76Нм Определяем суммарные изгибающие моменты: Определяем эквивалентные моменты: По рис.9 видно, что наиболее опасным является сечение С-С ведущего вала.
Расчет ведомого вала
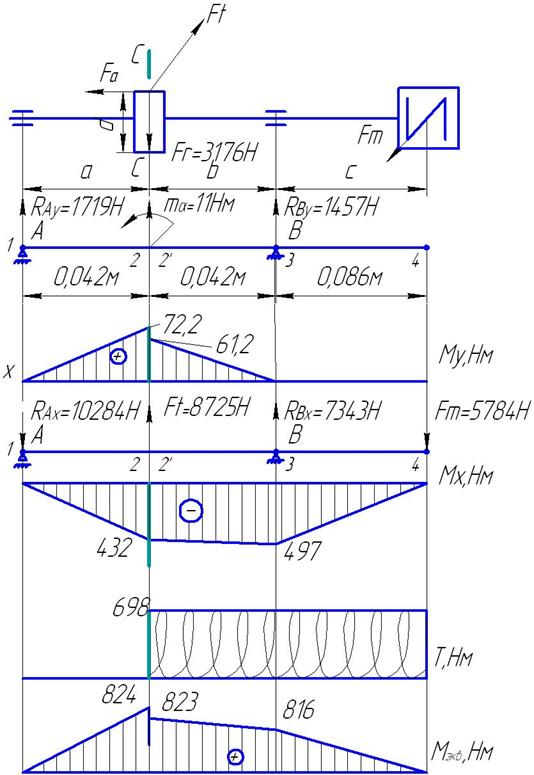
Расчет производим аналогично п.10.1. Заменяем вал балкой на опорах в местах подшипников. Рассматриваем вертикальную плоскость (ось у) Изгибающий момент от осевой силы Fа будет: mа=[Faxd/2]: mа=138·160× 10-3/2=11Н× м. Определяем реакции в подшипниках в вертикальной плоскости. 1å mАу=0 -RBy·(a+b)+Fr·a- mа=0 RBy=(Fr·0, 042- mа)/ 0, 084=(3176·0, 042-11)/ 0, 084=1457, 04Н Принимаем RBy=1457Н 2å mВу=0 RАy·(a+b)-Fr·b- mа=0 RАy==(Fr·0, 042+ mа)/ 0, 084=(3176·0, 042+11)/ 0, 084=1718, 95Н Принимаем RАy=1719Н Проверка: å FКу=0 RАy- Fr+ RBy=1719-3176+1457=0 Назначаем характерные точки 1, 2, 2’, 3 и 4 и определяем в них изгибающие моменты: М1у=0; М2у= RАy·а; М2у=1719·0, 042=72, 2Нм; М2’у= М2у- mа(слева); М2’у=72, 2-11=61, 2Нм; М3у=0; М4у=0; Строим эпюру изгибающих моментов Му, Нм. Рассматриваем горизонтальную плоскость (ось х) 1å mАх=0; Fm·(a+b+с)-RВх·(a+b)- Ft·a=0; 5784·(0, 042+0, 042+0, 086)-RВх·(0, 042+0, 042)-8725·0, 042=0; RВх=(983, 3-366, 45)/0, 084; RВх=7343, 2Н RВх»7343Н 2å mВх=0; -RАх·(a+b)+Ft·b+Fм·с= 0; RАх=(366, 45+497, 4)/0, 084; RАх=10284, 2Н RАх»10284Н Проверка å mКх=0; -RАх+ Ft- Fm+RВх=-7343+8725-5784+10284=0 Назначаем характерные точки 1, 2, 2’, 3 и 4 и определяем в них изгибающие моменты: М1х=0; М2х= -RАх·а; М2х=-10284·0, 042=-432Нм; М3х=- Fm ·с; М3х=-5784·0, 086=-497Нм М4х=0; Строим эпюру изгибающих моментов Мх. Крутящий момент ТI-I=0; ТII-II=T1=Ft·d2/2; ТII-II=698Нм Определяем суммарные изгибающие моменты: Определяем эквивалентные моменты:
Рис.10 Эпюры изгибающих и крутящих моментов ведомого вала
По рис.10 видно, что наиболее опасным является сечение С-С ведомого вала. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
Последнее изменение этой страницы: 2019-10-24; Просмотров: 272; Нарушение авторского права страницы


 ; (10.1)
; (10.1)
 Н
Н dДВ=32мм, шпонка bхh=10х8мм.
dДВ=32мм, шпонка bхh=10х8мм.

 .
.





 180мм.
180мм. ;
; 






 (10.2)
(10.2)